作者:陈立明 时间:2013-01-30 20:05:59
如果给料装置本身的开环控制特性的随机误差波动就大,再采用错误的积分滞后式检测来构成闭环,则无论采取任何先进的(自适应、预测、智能、鲁棒等等)控制技术理论都将失效。因为,虽然我们拥有先进的计算机技术,但即使伟大的爱因斯坦复活,也不可能建立起一个可修正随机干扰变化规律的数学模型。
为便于非专业人士的理解,我们设计一个控制精度比赛:A为顶尖赛车手的舒马赫先生,给他灌一瓶62度二锅头,使其醉酒后的视觉到动作的反应时间从0.1秒延长到3秒,再给他一辆方向飘得没谱(假设带有2度的方向随机波动和1秒的动作时延)的破车;B为刚拿到驾照的菜鸟您,具备正常0.3秒的反应时间再配一量辆方向正常的普通车,然后找个首都机场那么大的场地中间划条2000米醒目地标直线,要求您俩分别以50米距离垂直右转弯从一端进入直线赛道,保持80迈以上速度跑完2000米,比比谁控制的左轮迹偏离地标直线的误差大,比赛结果完全可昭然预测如下:
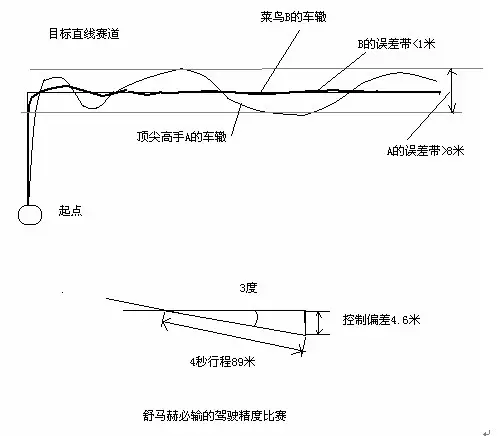
即使按3度偏差回切过中心线,由于A的视觉反应时间加方向机作用延时共计4秒以上,可计算出其最小修正偏差为sin3*80*1000/3600*4=4.6米
显然,A先生将以最先进的驾驶控制技术和最丰富的驾驶控制经验惨败于菜鸟B先生您!仅仅是因为方向机差些和反应慢些,就足以将英雄变成狗熊!
上述虚拟比赛说明,如果给料装置自身的开环控制特性的随机误差波动就比较小,驱动结构的动力惯性也轻盈快捷,再采用准确的即时式检测来构成闭环,则采取常规的计算机差分增量PID控制技术就足以取得很好的控制精度。
所以,脚踏实地打造好粉体给卸料环节的硬件基础,塑造出较好的开环控制特性,同时确保对流量的检测及时准确,提高其控制精度自然就水到渠成。既不必舍本逐末,指望从所谓先进的控制理论中去寻仙问道;也不必绕山转水,期待从复杂的气粉动流体力学中去雾花镜月。
五、结论
如果不穿透现实粉体控制的复杂表象,发现其下掩藏的内在本质规律,而是跟着问题的表象跑,就常常在现实中看见很多局部而肤浅的五花八门的技术处理方案。其实,要提高粉体控制精度,只要系统地在影响其的3个本质因素的基础环节上同时展开提升,就必然获得真正的推进。
1、卸料环节
前端必须配套通畅充盈的大库整体流供卸料系统,利用粉体动态拱下泄机制保持仓口粉体压力密度的均衡平稳,卸料结构要尽可能避免空气混入粉体夹带卸出,保持仓口具备满填充自适应供给流动性,避免再建中间小仓的复杂基建与设备迂回系统,不但要杜绝漏斗流形成的欠料断料,还要大幅消除仓内中高部位拱架垮塌的几率。
解决卸料的通畅平顺,使r>0.95,就可消弱供料引发的随机干扰因素,这是根除粉体控制失控的根源所在。
2、给料环节
装置必须具备良好料容结构,能充分吸收缓释高压含气粉体的流动性冲击,消除随机性冲料自流的可能。一方面要降低最终工作腔的进料填充压力P;另一方面同时要提升该工作腔的流动性前窜锁止力F,保证升程回程时具有稳定一致满填充给料结构,在高端流量工作减速时也能锁止粉体的惯性前向窜动,大幅减少工作点附近频繁的升回程调节的滞环效应,即开环控制特性形状应瘦身收窄细。控制量与被控制量间具备宽域的对应关系,要获得1%的控制精度,控制量的调节分度应保证达0.5%以上,并具备快速的稳态响应。
解决给料的锁止同步,使R<5%满程,就可消弱R的干扰影响,这是降低开环控制特性波动幅度的关键所在。
3、计量环节
采用响应最快的流量检测技术,要获得1%的控制精度,必须确保测量的长期稳定准确度在0.5%以上。
解决计量的及时准确,使t2<1秒,才可提升闭环的控制效率,这是通过闭环控制提升开环控制精度的要害所在。
2010年11月5日